
 International Atomic Energy Agency fact-finding team leader Mike Weightman examines Reactor Unit 3 at the Fukushima Daiichi Nuclear Power Plant on May 27, 2011. The team assessed damage from an earthquake and tsunami in March 2011 that caused three reactors at the plant to meltdown. A new project led by the School of Civil and Environmental Engineering’s Yong Cho could put robots on the ground in the immediate aftermath of such a disaster to carry out emergency work and search and rescue operations. (Photo: Gregg Webb / International Atomic Energy Agency) |
Disasters at nuclear power plants present all kinds of problems for search and rescue teams, from lethal radiation exposure to danger from weakened structures.
Associate Professor Yong Cho has begun work on a new project that could one day put robots on the ground in the immediate aftermath of a meltdown or other catastrophe, helping to rescue people trapped in the plant and contain dangerous nuclear material in situations where quick action is critical.
 This mobile robot autonomously gathers as-built information for construction sites or existing buildings. Equipped with a laser scanner and thermal inspection system, the robot can generate a real-time 3-D point cloud map with thermal and RGB data of the job site. A user can navigate the robot manually or set up the machine to move automatically through the desired area, including avoiding obstacles. It’s one of two robots involved in Yong Cho’s new project equipping robots to work in nuclear power plants after disasters. (Photo: Yong Cho) |
With funding from the U.S. Department of Defense, Cho and Woodruff School of Mechanical Engineering Associate Professor Jun Ueda will work with a team of South Korean researchers to solve some of the key challenges for robots at nuclear disaster sites. They’re one of the teams involved in a three-year, $6 million collaboration between the United States and South Korea, and their work could bear fruit for all kinds of disaster sites.
“This is a global problem in disasters,” said Cho, who runs the Robotics and Intelligent Construction Automation Lab in the School of Civil and Environmental Engineering and is the project’s principal investigator. “We've picked nuclear sites because it's a more severe situation than other disaster sites. It’s hard to send people to work there. It’s a completely remotely operated process. So, we chose the most difficult situation [because] if our approach works here, it should work at other disaster sites as well.”
To allow robots and their remote operators to work deep in wrecked and contaminated nuclear plants, the researchers will develop a 3-D model of the disaster site using the work Cho has been doing with a scanning robot his team built.
“Theoretically, we can map the whole site, digitize the whole nuclear plant, and then [rescue workers] can send the robots to the priority areas for rescue or search missions,” Cho said.
The project also will develop algorithms that teach robots how to recognize objects in the disaster site that have been damaged.
“When structures are damaged, how can we recognize this is a beam or column or this is a boiler system? With a complete model, we can train the robots, but when those structures are damaged, it's not easy to recognize,” Cho said. “I'm working on damaged or deformed object recognition and classification, because the robots need to recognize what it is first, then they can work on it.”
Cho also wants to use his mobile scanning robot to update the 3-D models in real time so operators manipulating robots by remote can see what they’re doing and multiple robots can work together.
Another aspect of the project will convert heavy construction equipment into remote-controlled robots. The South Korean researchers are developing modules to attach to existing equipment immediately after a disaster, allowing workers at a safe distance to operate a bulldozer or excavator inside contaminated or damaged sections of a nuclear plant.
“One of the benefits of this is that we can quickly convert locally available manipulators into robots,” Cho said. “[Those machines] can start initial cleanup work while other robots are still arriving.”
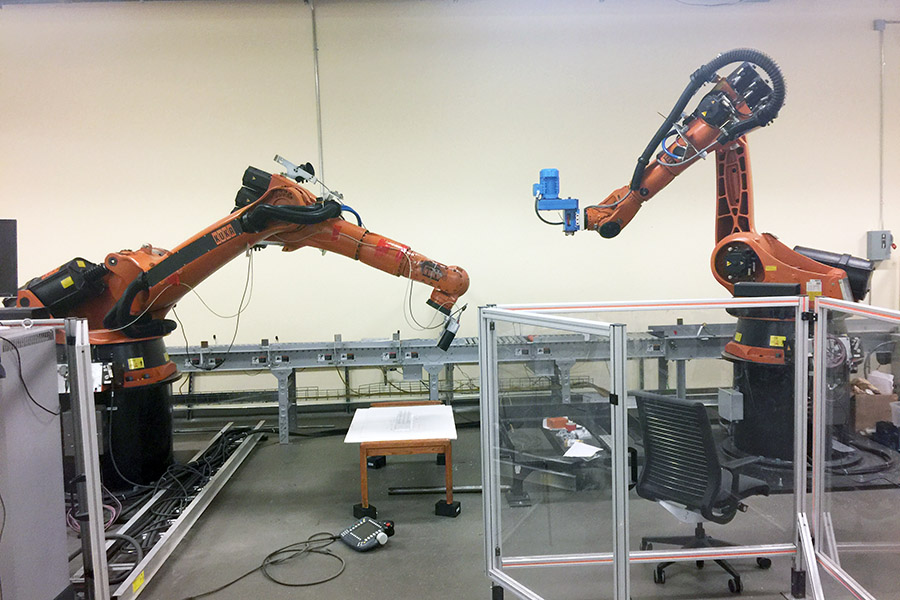 Yong Cho and Jun Ueda will use these two Kuka robotic arms at Georgia Tech’s Institute for Robotics and Intelligent Machines to test a technique where a remote operator uses two excavator arms to accomplish tasks after a disaster at a nuclear power plant, keeping workers away from harmful radiation and unsafe structures. (Photo: Yong Cho) |
The team will test an approach manipulating two excavator arms in concert to accomplish tasks while using Cho’s visualization system to see what they’re doing. Thanks to the Georgia Tech Institute for Robotics and Intelligent Machines, the team will be able to test that approach with two industrial robot arms in IRIM’s facilities. Cho and Ueda, the co-principal investigator, are core faculty members of the robotics institute.
“It is an unusual project for a civil engineer, working on search and rescue robots,” Cho said. “And then, there are not many people working in robotics in construction either, so it’s very unique. Also, it's a great collaboration between Korea and the U.S., and I’m excited to be part of it.”